项目简介
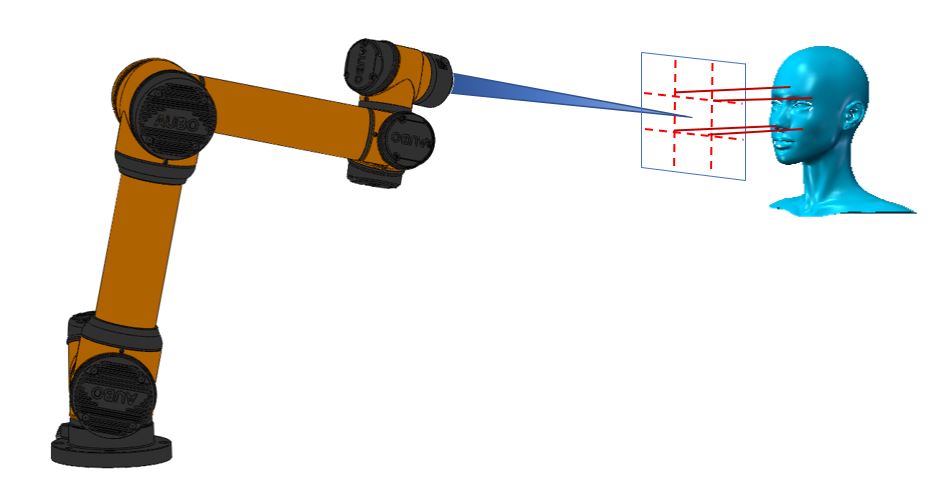
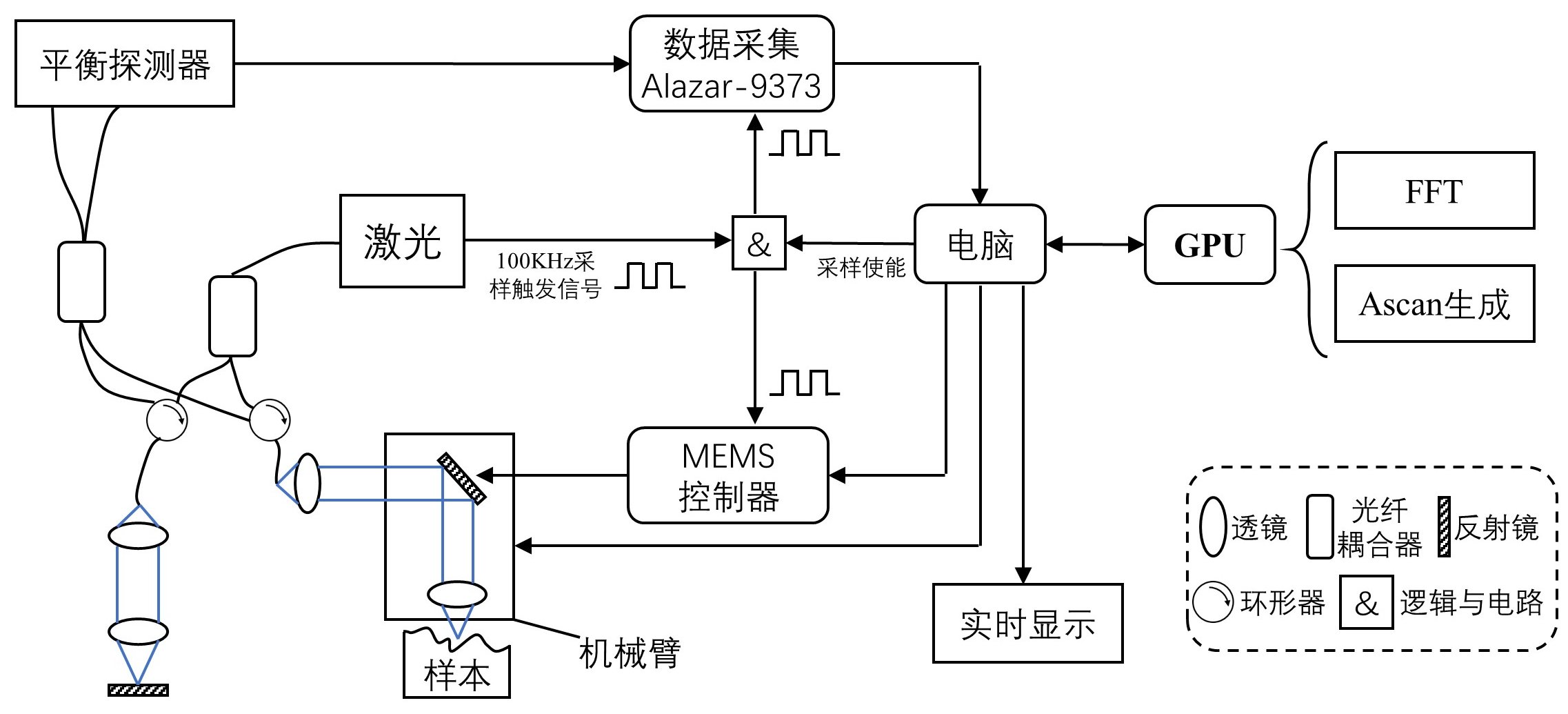
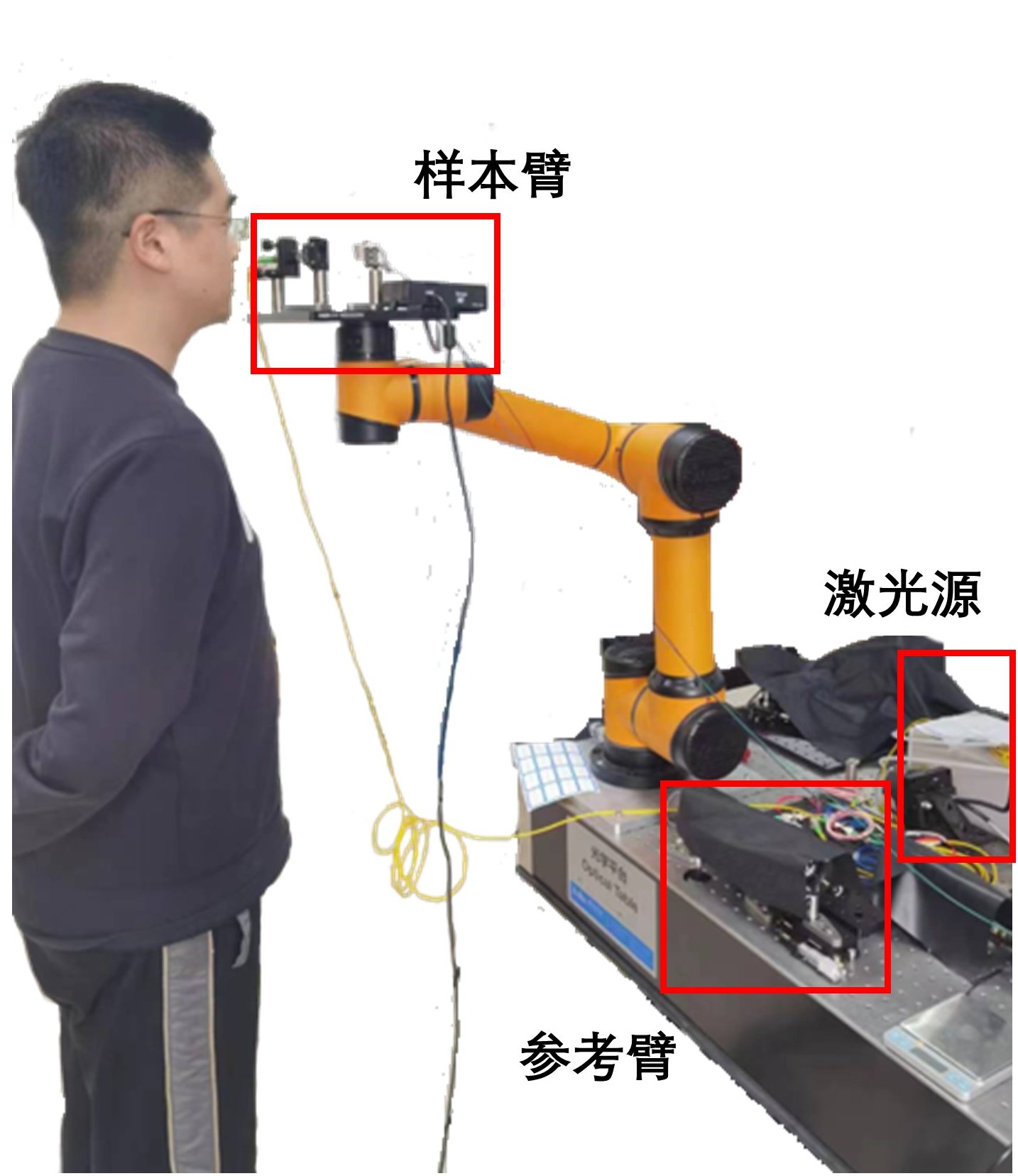
自1991年首次引入以来, 光学相干断层成像技术因其高分辨率和深度分辨成像的能力得到了广泛应用。然而, 其相对较小的视野范围(FOV)限制了 OCT技术的进一步应用。在许多生物医学应用中, 大生物样品的深度成像是必要的。此外,制造业和工业界也有对大样本的非破坏性成像和精确成像的需求。 本项目通过使用MEMS扫描振镜取代传统的扫描振镜, 减轻OCT系统样本臂的整体重量, 从而将OCT样本臂架设到六自由度机械臂上, 借助机械臂 的运动, 完成对大样本的深度成像。同时,通过提取OCT扫描图像上样本的表面点云,可以实现样本的表面精准建模。