Introduction
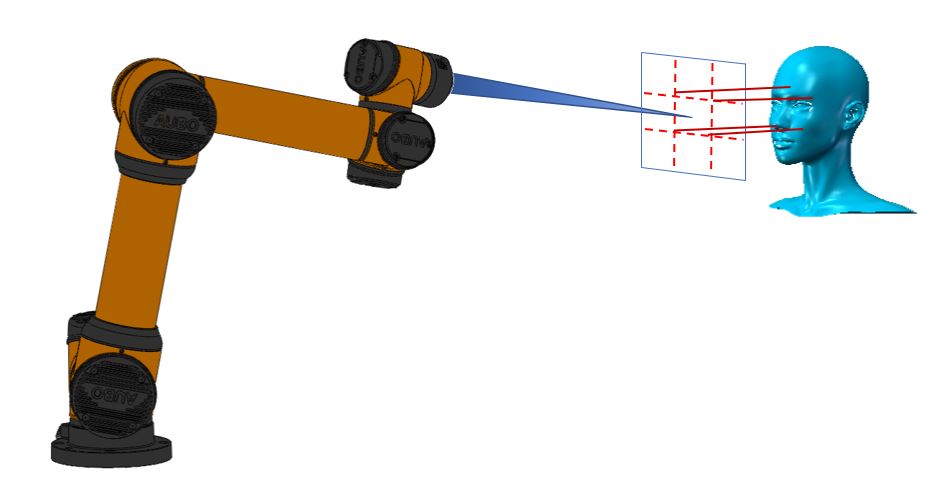
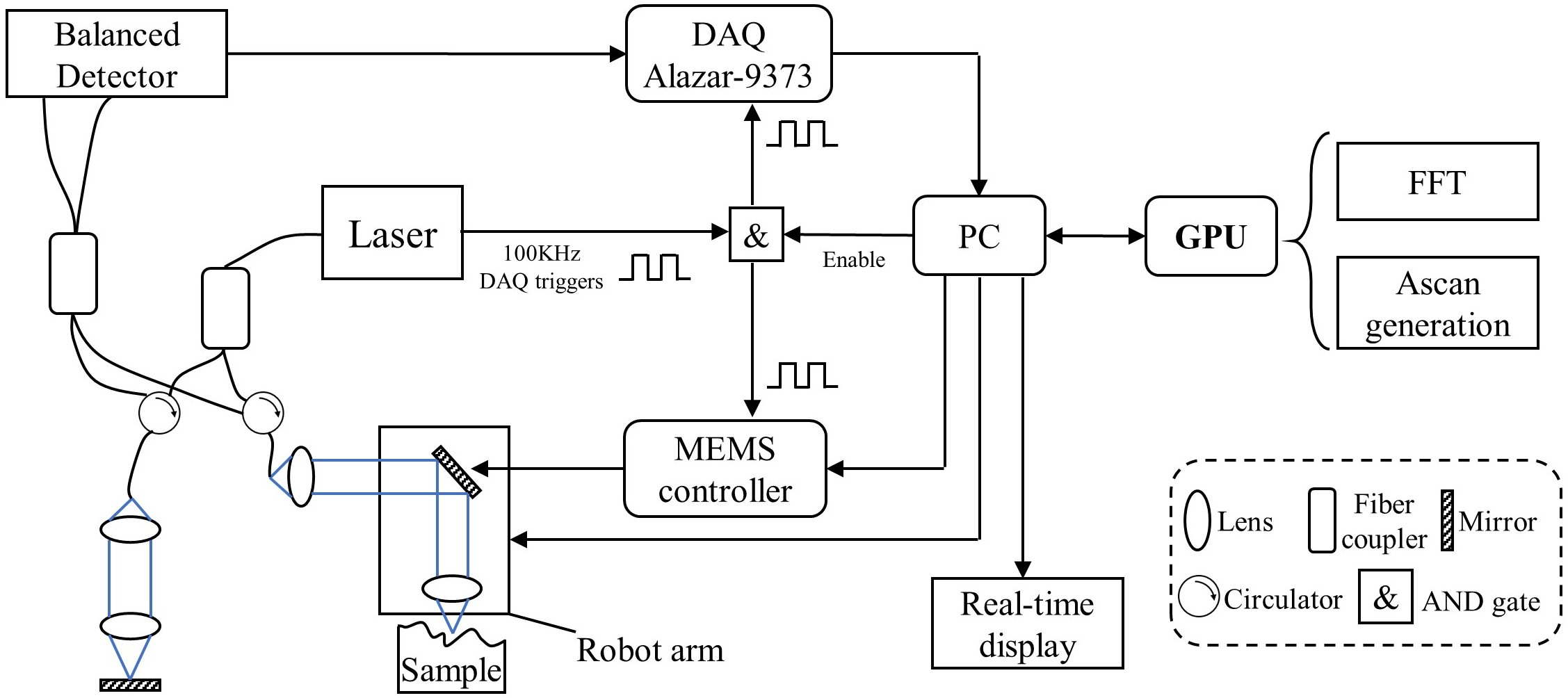
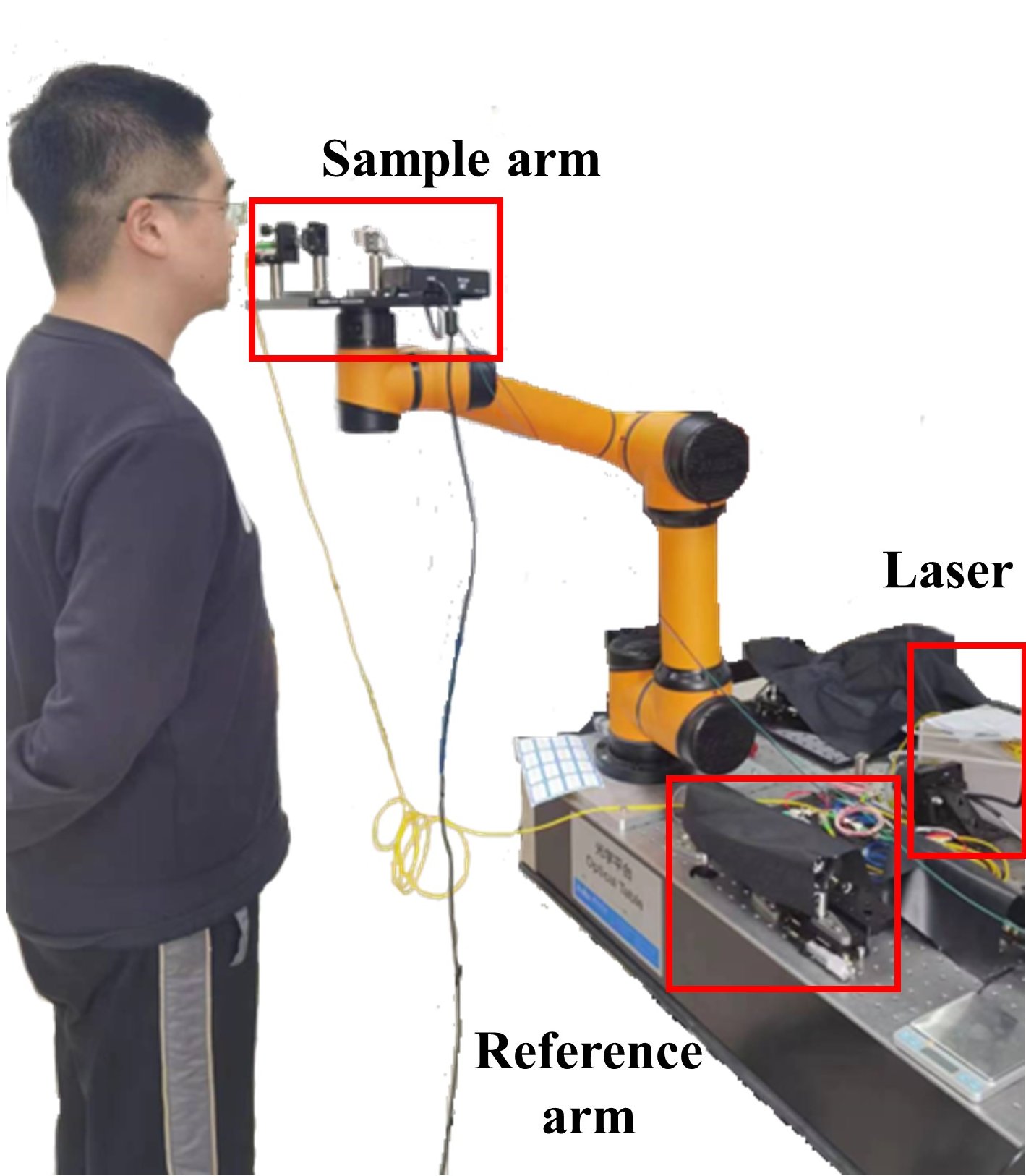
Since 1991, optical coherence tomography (OCT) has been widely used for high-resolution and depth-resolved imaging. However, its relatively small field-of-view (FOV) limits further applications, where imaging of large samples is necessary. In addition, there is also a demand for non-destructive and precise imaging of large targets in industry. In this project, the weight of the sample arm of the OCT system is reduced by using a MEMS galvo instead of a conventional galvo, so that the OCT sample arm can be mounted on a 6-axis robotic arm to perform trajectories for imaging large objects. At the same time, the surface of the sample can be accurately modeled by extracting the surface point cloud from data acquired by the OCT system.